ಡಿಫರೆನ್ಷಿಯಲ್ ಪ್ರೊಪೋರ್ಷನಲ್-ಇಂಟೆಗ್ರಲ್ ರೆಗ್ಯುಲೇಟರ್ ಎನ್ನುವುದು ಒಂದು ಸಾಧನವಾಗಿದ್ದು, ಅದನ್ನು ಬದಲಾಯಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿರುವ ನಿರ್ದಿಷ್ಟ ನಿಯತಾಂಕವನ್ನು ನಿರ್ವಹಿಸಲು ಸ್ವಯಂಚಾಲಿತ ವ್ಯವಸ್ಥೆಗಳಲ್ಲಿ ಸ್ಥಾಪಿಸಲಾಗಿದೆ.
ಮೊದಲ ನೋಟದಲ್ಲಿ ಇದು ಗೊಂದಲಮಯವಾಗಿದೆ, ಆದರೆ ನೀವು PID ನಿಯಂತ್ರಣವನ್ನು ಮತ್ತು ಡಮ್ಮೀಸ್ಗೆ ವಿವರಿಸಬಹುದು, ಅಂದರೆ. ವಿದ್ಯುನ್ಮಾನ ವ್ಯವಸ್ಥೆಗಳು ಮತ್ತು ಸಾಧನಗಳ ಬಗ್ಗೆ ಸಾಕಷ್ಟು ಪರಿಚಯವಿಲ್ಲದ ಜನರು.
ಪರಿವಿಡಿ
PID ನಿಯಂತ್ರಕ ಎಂದರೇನು?
PID ನಿಯಂತ್ರಕವು ಕಡ್ಡಾಯ ಪ್ರತಿಕ್ರಿಯೆಯೊಂದಿಗೆ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ನಲ್ಲಿ ನಿರ್ಮಿಸಲಾದ ಸಾಧನವಾಗಿದೆ. ಸೆಟ್ಪಾಯಿಂಟ್ಗಳ ಸೆಟ್ ಮಟ್ಟವನ್ನು ನಿರ್ವಹಿಸಲು ಇದನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ, ಉದಾಹರಣೆಗೆ, ಗಾಳಿಯ ಉಷ್ಣತೆ.
ಸಂವೇದಕಗಳು ಅಥವಾ ಸಂವೇದಕಗಳಿಂದ ಸ್ವೀಕರಿಸಿದ ಡೇಟಾವನ್ನು ಆಧರಿಸಿ ಸಾಧನವು ನಿಯಂತ್ರಣ ಸಾಧನಕ್ಕೆ ನಿಯಂತ್ರಣ ಸಂಕೇತ ಅಥವಾ ಔಟ್ಪುಟ್ ಸಂಕೇತವನ್ನು ಕಳುಹಿಸುತ್ತದೆ. ನಿಯಂತ್ರಕಗಳು ಹೆಚ್ಚಿನ ಅಸ್ಥಿರ ನಿಖರತೆ ಮತ್ತು ಸೆಟ್ ಕಾರ್ಯವನ್ನು ನಿರ್ವಹಿಸುವ ಗುಣಮಟ್ಟವನ್ನು ಹೊಂದಿವೆ.
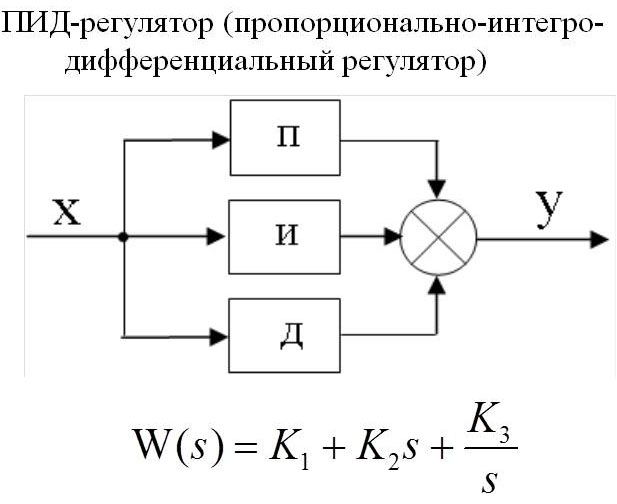
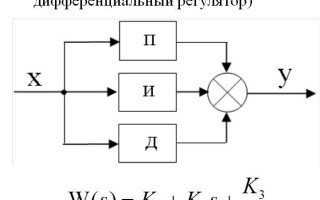
PID ನಿಯಂತ್ರಕದ ಮೂರು ಗುಣಾಂಕಗಳು ಮತ್ತು ಕಾರ್ಯಾಚರಣೆಯ ತತ್ವ
PID ನಿಯಂತ್ರಕದ ಕಾರ್ಯಾಚರಣೆಯು ಪೂರ್ವನಿರ್ಧರಿತ ಮಟ್ಟದಲ್ಲಿ ನಿಯಂತ್ರಿತ ಪ್ಯಾರಾಮೀಟರ್ ಅನ್ನು ನಿರ್ವಹಿಸಲು ಅಗತ್ಯವಾದ ಶಕ್ತಿಯ ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ ಅನ್ನು ಒದಗಿಸುವುದು. ಸೂಚ್ಯಂಕವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ಸಂಕೀರ್ಣವಾದ ಗಣಿತದ ಸೂತ್ರವನ್ನು ಬಳಸಿ, ಇದರಲ್ಲಿ 3 ಗುಣಾಂಕಗಳು ಸೇರಿವೆ - ಅನುಪಾತ, ಅವಿಭಾಜ್ಯ, ಭೇದಾತ್ಮಕ.
ನೀರಿನೊಂದಿಗೆ ಟ್ಯಾಂಕ್ ಅನ್ನು ನಿಯಂತ್ರಣದ ವಸ್ತುವಾಗಿ ತೆಗೆದುಕೊಳ್ಳೋಣ, ಇದರಲ್ಲಿ ಉಗಿಯೊಂದಿಗೆ ಕವಾಟವನ್ನು ತೆರೆಯುವ ಮಟ್ಟವನ್ನು ನಿಯಂತ್ರಿಸುವ ಮೂಲಕ ತಾಪಮಾನವನ್ನು ಪೂರ್ವನಿರ್ಧರಿತ ಮಟ್ಟದಲ್ಲಿ ನಿರ್ವಹಿಸುವುದು ಅವಶ್ಯಕ.
ಇನ್ಪುಟ್ ಡೇಟಾದೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗದ ಕ್ಷಣದಲ್ಲಿ ಅನುಪಾತದ ಘಟಕವು ಕಾಣಿಸಿಕೊಳ್ಳುತ್ತದೆ. ಸರಳವಾಗಿ ಹೇಳುವುದಾದರೆ, ಇದು ಈ ರೀತಿ ಧ್ವನಿಸುತ್ತದೆ - ನಿಜವಾದ ತಾಪಮಾನ ಮತ್ತು ಅಪೇಕ್ಷಿತ ತಾಪಮಾನದ ನಡುವಿನ ವ್ಯತ್ಯಾಸವನ್ನು ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ, ಹೊಂದಾಣಿಕೆ ಗುಣಾಂಕದಿಂದ ಗುಣಿಸಿ ಮತ್ತು ಕವಾಟಕ್ಕೆ ಅನ್ವಯಿಸಬೇಕಾದ ಔಟ್ಪುಟ್ ಸಿಗ್ನಲ್ ಅನ್ನು ಪಡೆಯಲಾಗುತ್ತದೆ. ಅಂದರೆ ಡಿಗ್ರಿಗಳು ಕುಸಿದ ತಕ್ಷಣ, ತಾಪನ ಪ್ರಕ್ರಿಯೆಯು ಪ್ರಾರಂಭವಾಗುತ್ತದೆ, ತಾಪಮಾನವು ಅಪೇಕ್ಷಿತ ಮಟ್ಟಕ್ಕಿಂತ ಹೆಚ್ಚಾದ ತಕ್ಷಣ, ಅದನ್ನು ಸ್ವಿಚ್ ಆಫ್ ಮಾಡಲಾಗುತ್ತದೆ ಅಥವಾ ತಂಪಾಗಿಸಲಾಗುತ್ತದೆ.
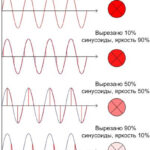
ಮುಂದೆ ಅವಿಭಾಜ್ಯ ಘಟಕವು ಬರುತ್ತದೆ, ಇದು ಪರಿಸರದ ಪರಿಣಾಮಗಳು ಅಥವಾ ನಮ್ಮ ತಾಪಮಾನವನ್ನು ನಿಗದಿತ ಹಂತದಲ್ಲಿ ಇರಿಸಿಕೊಳ್ಳುವ ಇತರ ಗೊಂದಲದ ಪ್ರಭಾವಗಳಿಗೆ ಸರಿದೂಗಿಸಲು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಯಾವಾಗಲೂ ನಿಯಂತ್ರಿಸಲ್ಪಡುವ ಸಾಧನಗಳ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವ ಹೆಚ್ಚುವರಿ ಅಂಶಗಳು ಇರುವುದರಿಂದ, ಪ್ರಮಾಣಾನುಗುಣ ಘಟಕವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ಡೇಟಾ ಬಂದಾಗ ಸಂಖ್ಯೆಯು ಈಗಾಗಲೇ ಬದಲಾಗುತ್ತಿದೆ. ಮತ್ತು ಹೆಚ್ಚಿನ ಬಾಹ್ಯ ಪ್ರಭಾವಗಳು, ಚಿತ್ರದಲ್ಲಿ ಹೆಚ್ಚಿನ ಏರಿಳಿತಗಳು. ಪೂರೈಕೆಯಾಗುವ ವಿದ್ಯುತ್ನಲ್ಲಿ ಸ್ಪೈಕ್ಗಳಿವೆ.
ಅವಿಭಾಜ್ಯ ಘಟಕವು ಬದಲಾಗಿದ್ದರೆ ಹಿಂದಿನ ಮೌಲ್ಯಗಳ ಆಧಾರದ ಮೇಲೆ ತಾಪಮಾನ ಮೌಲ್ಯವನ್ನು ಹಿಂತಿರುಗಿಸಲು ಪ್ರಯತ್ನಿಸುತ್ತದೆ. ಕೆಳಗಿನ ವೀಡಿಯೊದಲ್ಲಿ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಹೆಚ್ಚು ವಿವರವಾಗಿ ವಿವರಿಸಲಾಗಿದೆ.
ನಂತರ, ರೆಗ್ಯುಲೇಟರ್ನ ಔಟ್ಪುಟ್, ಗುಣಾಂಕದ ಪ್ರಕಾರ, ತಾಪಮಾನವನ್ನು ಹೆಚ್ಚಿಸಲು ಅಥವಾ ಕಡಿಮೆ ಮಾಡಲು ಆಹಾರವನ್ನು ನೀಡಲಾಗುತ್ತದೆ. ಕಾಲಾನಂತರದಲ್ಲಿ, ಬಾಹ್ಯ ಅಂಶಗಳಿಗೆ ಸರಿದೂಗಿಸುವ ಮೌಲ್ಯವನ್ನು ಆಯ್ಕೆಮಾಡಲಾಗುತ್ತದೆ ಮತ್ತು ಜಿಗಿತಗಳು ಕಣ್ಮರೆಯಾಗುತ್ತವೆ.
ಸ್ಥಿರ ದೋಷವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವ ಮೂಲಕ ದೋಷಗಳನ್ನು ತೊಡೆದುಹಾಕಲು ಅವಿಭಾಜ್ಯವನ್ನು ಬಳಸಲಾಗುತ್ತದೆ. ಈ ಪ್ರಕ್ರಿಯೆಯಲ್ಲಿ ಮುಖ್ಯ ವಿಷಯವೆಂದರೆ ಸರಿಯಾದ ಗುಣಾಂಕವನ್ನು ಆಯ್ಕೆ ಮಾಡುವುದು, ಇಲ್ಲದಿದ್ದರೆ ದೋಷ (ಅಸಾಮರಸ್ಯ) ಅವಿಭಾಜ್ಯ ಘಟಕದ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ.
ಮೂರನೇ PID ಘಟಕವು ವಿಭಿನ್ನ ಅಂಶವಾಗಿದೆ. ಸಿಸ್ಟಮ್ ಮೇಲಿನ ಪರಿಣಾಮ ಮತ್ತು ಪ್ರತಿಕ್ರಿಯೆಯ ನಡುವೆ ಉಂಟಾಗುವ ವಿಳಂಬದ ಪರಿಣಾಮವನ್ನು ಸರಿದೂಗಿಸಲು ಇದನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ.ತಾಪಮಾನವು ಅಪೇಕ್ಷಿತ ಬಿಂದುವನ್ನು ತಲುಪುವವರೆಗೆ ಅನುಪಾತದ ನಿಯಂತ್ರಕವು ಶಕ್ತಿಯನ್ನು ನೀಡುತ್ತದೆ, ಆದರೆ ಮಾಹಿತಿಯು ಉಪಕರಣಕ್ಕೆ ಪ್ರಯಾಣಿಸುವಾಗ ಯಾವಾಗಲೂ ದೋಷಗಳಿವೆ, ವಿಶೇಷವಾಗಿ ದೊಡ್ಡ ಮೌಲ್ಯಗಳೊಂದಿಗೆ. ಇದು ಅಧಿಕ ತಾಪಕ್ಕೆ ಕಾರಣವಾಗಬಹುದು. ಡಿಫರೆನ್ಷಿಯಲ್ ವಿಳಂಬಗಳು ಅಥವಾ ಪರಿಸರದ ಪ್ರಭಾವಗಳಿಂದ ಉಂಟಾಗುವ ವಿಚಲನಗಳನ್ನು ಮುನ್ಸೂಚಿಸುತ್ತದೆ ಮತ್ತು ಮುಂಚಿತವಾಗಿ ಸರಬರಾಜು ಮಾಡುವ ಶಕ್ತಿಯನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ.
PID ನಿಯಂತ್ರಕವನ್ನು ಹೊಂದಿಸಲಾಗುತ್ತಿದೆ
PID ನಿಯಂತ್ರಕವನ್ನು ಹೊಂದಿಸುವುದನ್ನು 2 ವಿಧಾನಗಳನ್ನು ಬಳಸಿ ಮಾಡಲಾಗುತ್ತದೆ:
- ಸಿಂಥೆಸಿಸ್ ಸಿಸ್ಟಮ್ ಮಾದರಿಯ ಆಧಾರದ ಮೇಲೆ ನಿಯತಾಂಕಗಳನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದನ್ನು ಒಳಗೊಂಡಿರುತ್ತದೆ. ಅಂತಹ ಶ್ರುತಿ ನಿಖರವಾಗಿದೆ, ಆದರೆ ಸ್ವಯಂಚಾಲಿತ ನಿಯಂತ್ರಣ ಸಿದ್ಧಾಂತದ ಆಳವಾದ ಜ್ಞಾನದ ಅಗತ್ಯವಿದೆ. ಇದು ಎಂಜಿನಿಯರ್ಗಳು ಮತ್ತು ವಿಜ್ಞಾನಿಗಳಿಂದ ಮಾತ್ರ ಸಾಧ್ಯ. ಏಕೆಂದರೆ ಹರಿವಿನ ಗುಣಲಕ್ಷಣಗಳನ್ನು ತೆಗೆದುಕೊಳ್ಳುವುದು ಮತ್ತು ಬಹಳಷ್ಟು ಲೆಕ್ಕಾಚಾರಗಳನ್ನು ಮಾಡುವುದು ಅವಶ್ಯಕ.
- ಹಸ್ತಚಾಲಿತ ವಿಧಾನವು ಪ್ರಯೋಗ ಮತ್ತು ದೋಷ ವಿಧಾನವನ್ನು ಆಧರಿಸಿದೆ. ಈ ಉದ್ದೇಶಕ್ಕಾಗಿ, ಈಗಾಗಲೇ ಸಿದ್ಧವಾಗಿರುವ ಸಿಸ್ಟಮ್ನ ಡೇಟಾವನ್ನು ಆಧಾರವಾಗಿ ತೆಗೆದುಕೊಳ್ಳಲಾಗುತ್ತದೆ ಮತ್ತು ಒಂದು ಅಥವಾ ಹೆಚ್ಚಿನ ನಿಯಂತ್ರಕ ಗುಣಾಂಕಗಳಿಗೆ ಕೆಲವು ಹೊಂದಾಣಿಕೆಗಳನ್ನು ಮಾಡಲಾಗುತ್ತದೆ. ಸ್ವಿಚ್ ಆನ್ ಮಾಡಿದ ನಂತರ ಮತ್ತು ಅಂತಿಮ ಫಲಿತಾಂಶವನ್ನು ಗಮನಿಸಿದ ನಂತರ, ನಿಯತಾಂಕಗಳನ್ನು ಸರಿಯಾದ ದಿಕ್ಕಿನಲ್ಲಿ ಬದಲಾಯಿಸಲಾಗುತ್ತದೆ. ಮತ್ತು ಅಪೇಕ್ಷಿತ ಮಟ್ಟದ ಕಾರ್ಯಾಚರಣೆಯನ್ನು ಸಾಧಿಸುವವರೆಗೆ.
ವಿಶ್ಲೇಷಣೆ ಮತ್ತು ಟ್ಯೂನಿಂಗ್ನ ಸೈದ್ಧಾಂತಿಕ ವಿಧಾನವು ಆಚರಣೆಯಲ್ಲಿ ವಿರಳವಾಗಿ ಬಳಸಲ್ಪಡುತ್ತದೆ, ಇದು ನಿಯಂತ್ರಣ ವಸ್ತುವಿನ ಗುಣಲಕ್ಷಣಗಳ ಅಜ್ಞಾನ ಮತ್ತು ಬಹಳಷ್ಟು ಸಂಭವನೀಯ ಗೊಂದಲದ ಪ್ರಭಾವಗಳ ಕಾರಣದಿಂದಾಗಿರುತ್ತದೆ. ವ್ಯವಸ್ಥೆಯ ವೀಕ್ಷಣೆಯ ಆಧಾರದ ಮೇಲೆ ಪ್ರಾಯೋಗಿಕ ವಿಧಾನಗಳು ಹೆಚ್ಚು ಸಾಮಾನ್ಯವಾಗಿದೆ.
ನಿಯಂತ್ರಕ ಗುಣಾಂಕಗಳನ್ನು ಸರಿಹೊಂದಿಸಲು ಕಾರ್ಯಕ್ರಮಗಳ ನಿಯಂತ್ರಣದಲ್ಲಿ ಆಧುನಿಕ ಸ್ವಯಂಚಾಲಿತ ಪ್ರಕ್ರಿಯೆಗಳನ್ನು ವಿಶೇಷ ಮಾಡ್ಯೂಲ್ಗಳಾಗಿ ಅಳವಡಿಸಲಾಗಿದೆ.
PID ನಿಯಂತ್ರಕದ ಉದ್ದೇಶ
ಸ್ವಯಂಚಾಲಿತ ನಿಯಂತ್ರಣ ಕವಾಟಗಳಂತಹ ಪ್ರಚೋದಕಗಳ ಮೇಲಿನ ನಿಯಂತ್ರಣ ಕ್ರಿಯೆಯನ್ನು ಬದಲಾಯಿಸುವ ಮೂಲಕ ಅಗತ್ಯವಿರುವ ಮಟ್ಟದಲ್ಲಿ ತಾಪಮಾನ, ಒತ್ತಡ, ಟ್ಯಾಂಕ್ ಮಟ್ಟ, ಪೈಪ್ಲೈನ್ನಲ್ಲಿನ ಹರಿವು, ಯಾವುದೋ ಸಾಂದ್ರತೆಯಂತಹ ಕೆಲವು ಮೌಲ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸಲು PID ನಿಯಂತ್ರಕವನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಅದರ ಸೆಟ್ಟಿಂಗ್ಗಾಗಿ ಪ್ರಮಾಣಾನುಗುಣ, ಏಕೀಕರಣ, ವಿಭಿನ್ನ ಮೌಲ್ಯಗಳು.
ಬೃಹತ್ ಕೈಗಾರಿಕೆಗಳು ಮತ್ತು ವಿದ್ಯುತ್ ಸ್ಥಾವರ ರಿಯಾಕ್ಟರ್ಗಳನ್ನು ನಿಯಂತ್ರಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿರುವ ನಿಖರವಾದ ನಿಯಂತ್ರಣ ಸಂಕೇತವನ್ನು ಪಡೆಯುವುದು ಬಳಕೆಯ ಉದ್ದೇಶವಾಗಿದೆ.
ತಾಪಮಾನ ನಿಯಂತ್ರಣ ಸರ್ಕ್ಯೂಟ್ನ ಉದಾಹರಣೆ
ತಾಪಮಾನ ನಿಯಂತ್ರಣದಲ್ಲಿ PID ನಿಯಂತ್ರಕಗಳನ್ನು ಹೆಚ್ಚಾಗಿ ಬಳಸಲಾಗುತ್ತದೆ, ಈ ಸ್ವಯಂಚಾಲಿತ ಪ್ರಕ್ರಿಯೆಯನ್ನು ನೋಡಲು ಟ್ಯಾಂಕ್ನಲ್ಲಿ ನೀರನ್ನು ಬಿಸಿ ಮಾಡುವ ಸರಳ ಉದಾಹರಣೆಯನ್ನು ಬಳಸೋಣ.
ಟ್ಯಾಂಕ್ ದ್ರವದಿಂದ ತುಂಬಿರುತ್ತದೆ, ಅದನ್ನು ಬಯಸಿದ ತಾಪಮಾನಕ್ಕೆ ಬಿಸಿಮಾಡಲು ಮತ್ತು ಅಪೇಕ್ಷಿತ ಮಟ್ಟದಲ್ಲಿ ನಿರ್ವಹಿಸಬೇಕಾಗುತ್ತದೆ. ತೊಟ್ಟಿಯ ಒಳಗೆ ತಾಪಮಾನವನ್ನು ಅಳೆಯಲು ಸಂವೇದಕವಿದೆ - ಉಷ್ಣಯುಗ್ಮ ಅಥವಾ ಪ್ರತಿರೋಧ ಥರ್ಮಾಮೀಟರ್ ಮತ್ತು ನೇರವಾಗಿ PID ನಿಯಂತ್ರಕಕ್ಕೆ ಸಂಪರ್ಕ ಹೊಂದಿದೆ.
ಸ್ವಯಂಚಾಲಿತ ನಿಯಂತ್ರಣ ಕವಾಟದೊಂದಿಗೆ ಕೆಳಗಿನ ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ ನಾವು ದ್ರವವನ್ನು ಬಿಸಿಮಾಡಲು ಉಗಿಯನ್ನು ಪೂರೈಸುತ್ತೇವೆ. ಕವಾಟವು ಸ್ವತಃ ನಿಯಂತ್ರಕದಿಂದ ಸಂಕೇತವನ್ನು ಪಡೆಯುತ್ತದೆ. ಟ್ಯಾಂಕ್ನಲ್ಲಿ ನಿರ್ವಹಿಸಬೇಕಾದ PID ನಿಯಂತ್ರಕದಲ್ಲಿ ಆಪರೇಟರ್ ತಾಪಮಾನ ಸೆಟ್ ಪಾಯಿಂಟ್ ಮೌಲ್ಯವನ್ನು ಪ್ರವೇಶಿಸುತ್ತದೆ.

ನಿಯಂತ್ರಕ ಗುಣಾಂಕಗಳು ತಪ್ಪಾಗಿದ್ದರೆ, ನೀರಿನ ತಾಪಮಾನವು ಜಿಗಿಯುತ್ತದೆ ಮತ್ತು ಕವಾಟವು ಸಂಪೂರ್ಣವಾಗಿ ತೆರೆದಿರುತ್ತದೆ ಅಥವಾ ಸಂಪೂರ್ಣವಾಗಿ ಮುಚ್ಚಲ್ಪಡುತ್ತದೆ. ಈ ಸಂದರ್ಭದಲ್ಲಿ PID ಗುಣಾಂಕಗಳನ್ನು ಲೆಕ್ಕಹಾಕಬೇಕು ಮತ್ತು ಮತ್ತೆ ನಮೂದಿಸಬೇಕು. ಎಲ್ಲವನ್ನೂ ಸರಿಯಾಗಿ ಮಾಡಿದರೆ, ಸ್ವಲ್ಪ ಸಮಯದ ನಂತರ ಸಿಸ್ಟಮ್ ಪ್ರಕ್ರಿಯೆಯನ್ನು ಸಮನಾಗಿರುತ್ತದೆ ಮತ್ತು ತೊಟ್ಟಿಯಲ್ಲಿನ ತಾಪಮಾನವನ್ನು ಸೆಟ್ ಪಾಯಿಂಟ್ನಲ್ಲಿ ನಿರ್ವಹಿಸಲಾಗುತ್ತದೆ, ನಿಯಂತ್ರಣ ಕವಾಟವನ್ನು ತೆರೆಯುವ ಮಟ್ಟವು ಮಧ್ಯದ ಸ್ಥಾನದಲ್ಲಿರುತ್ತದೆ.
ಸಂಬಂಧಿತ ಲೇಖನಗಳು: